 Jake Rubin
Jake Rubin
 Leo Kamino Barros
Leo Kamino Barros
 Şan Halaçoğlu
Şan Halaçoğlu
 Ilam Imayavaramban
Ilam Imayavaramban
Feb 17, 2022 – March 10, 2022
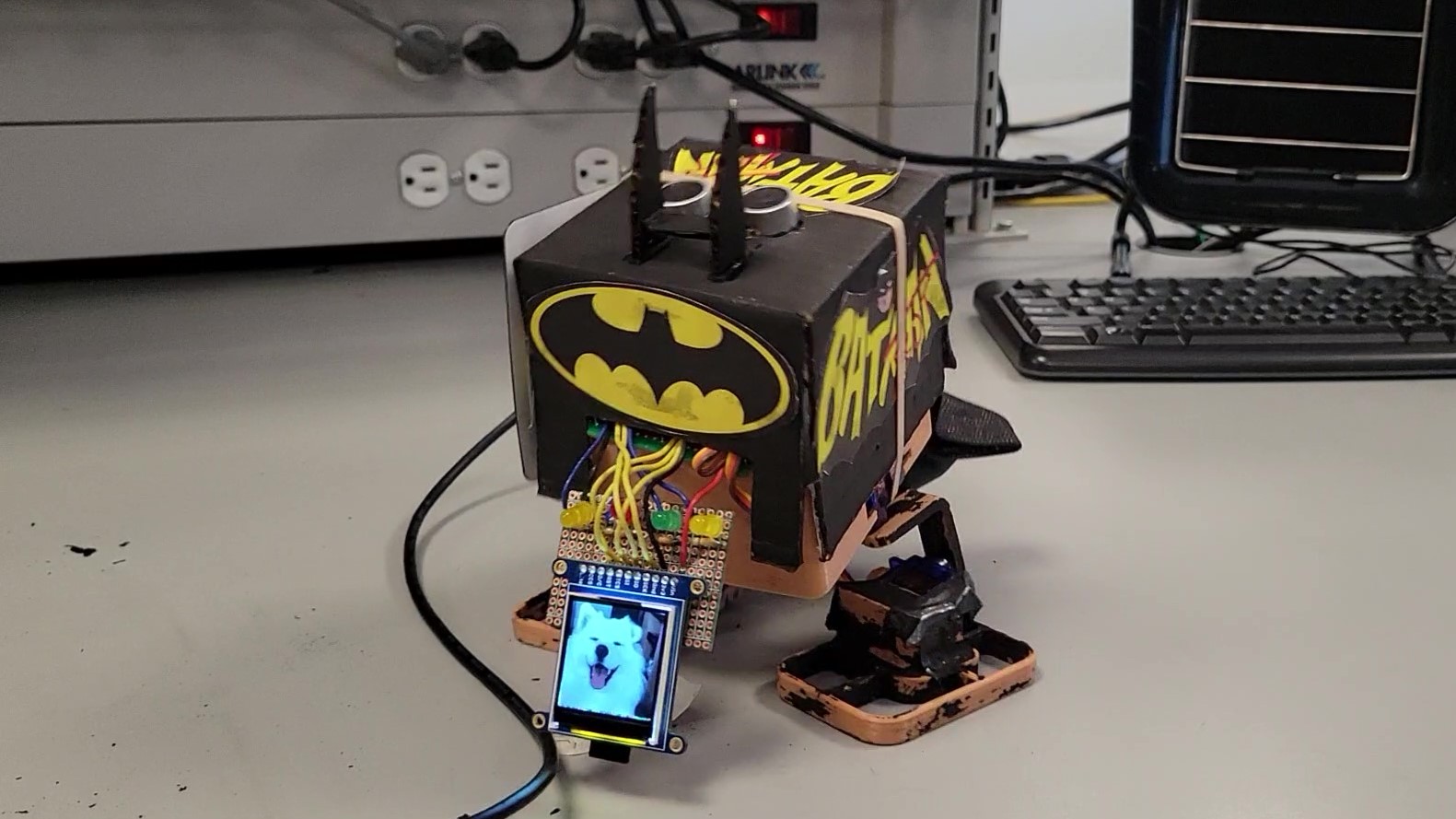
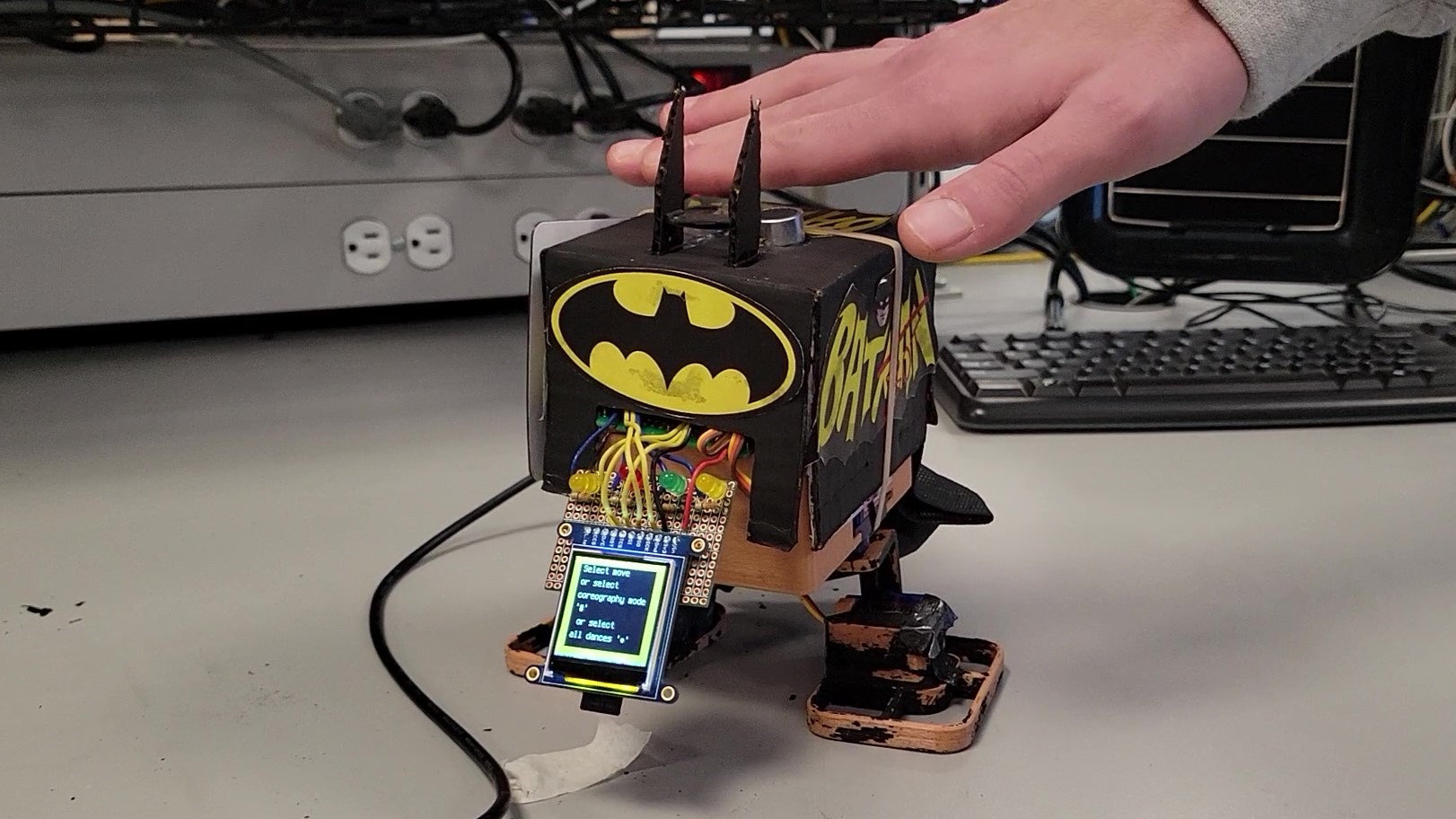
This was the first project assigned in CPEN 291: Computer Engineering Design Studio I. The goal of this project was to build a dancing robot, demonstrating skills with circuit construction and controlling complex hardware components via software. The decision to add the Batman theme was for overall aesthetics and for weight distribution via the cape.
| Quantity | Item Name | Item Type |
|---|---|---|
| 1 | 3D-Printed Robot Body (provided) | |
| 2 | 3D-Printed Robot Foot (provided) | |
| 1 | Adafruit Microcontroller | ItsyBitsy M4 |
| 1 | Adafruit 1.44" TFT Breakout Liquid Crystal Display | ST7735R |
| 1 | Ultrasonic Distance Sensor | HC-SR04 |
| 1 | Shift Register | 74HC595 |
| 1 | Piezo Buzzer | |
| 1 | Adafruit 3×4 Keypad | |
| 4 | Mini-Servo Motor | |
| 4 | 330 ± 16.5Ω Resistor | |
| 4 | LED |
2 × Yellow 1 × Green 1 × Red |
| 1 | Solderable Perfboard | |
| 1 | Solderless Breadboard | |
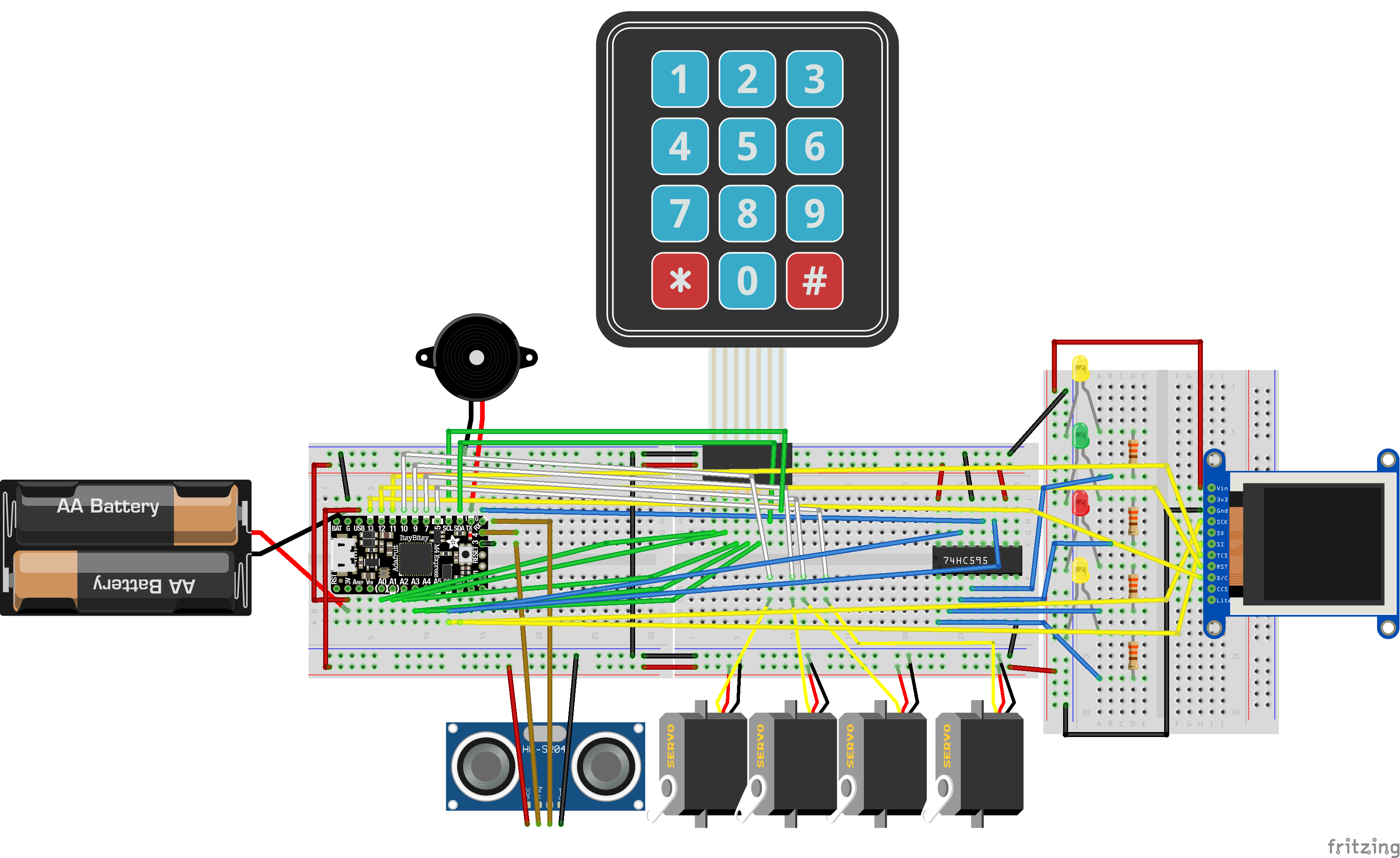
| Click to view this project's Fritzing. | ||
Batbot Fritzing




Utilizing the Piezo buzzer served two purposes: provide the user with auditory feedback, and provide the robot with personality.
This was accomplished using one or more instances of CircuitPython's simpleio.tone() function.
In total, there were seven sounds created for this project, stored as single commands or functions
(click each title to hear the sound it describes):
In order to give the user prompts, we needed to display text on the liquid crystal display (LCD). To fit the theme of Batbot, this text displays on a black box with a yellow border. The function used to achieve this uses a string argument of the text to display, and consists of four processes:
adafruit_display_text.label of white text, and display within the dimensions of the inner box.
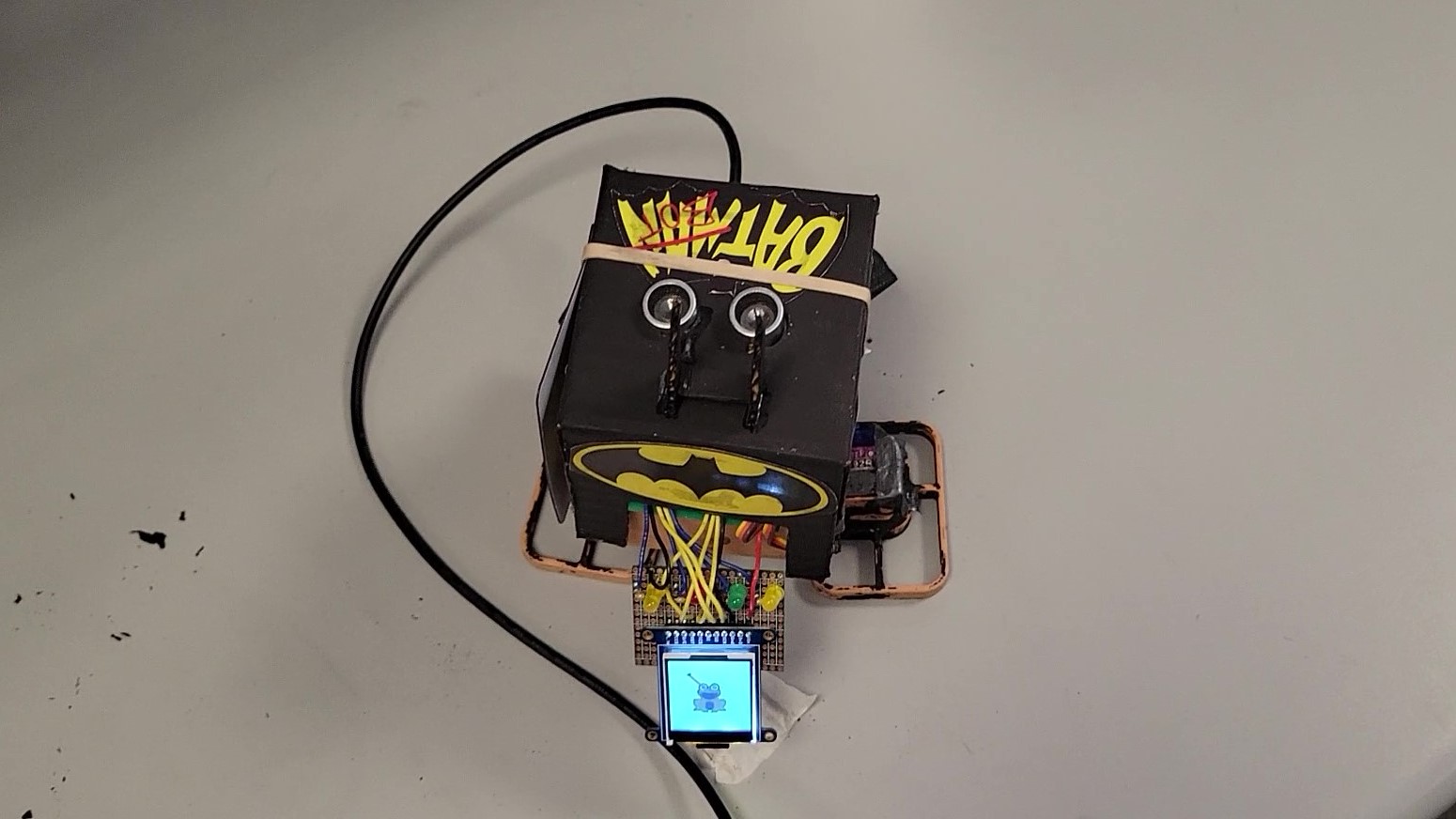
Not only does Batbot's LCD display text, but it can also display bitmap images. However, it's enticing if the images can move with the robot rather than remaining constant. Therefore, to simulate a GIF, we split GIFs into several bitmap images and dispersed calls to display these images throughout our dance sequences. We displayed these images on the LCD in four steps:
displayio.OnDiskBitmap() function, the source of the image to display, passed as an argument to the function, can be used to access the bitmap image.
The four LEDs on the front of the robot allowed for visual feedback and flair.
This was done by accessing the group of pins in the 74HC595 shift register and turning the value of each pin to True or False as needed,
using CircuitPython's time.sleep() function to provide the timing of each sequence.
Two main LED sequences were made for Batbot:
On activation, the robot displays a prompt to enter a password to grant user access. This was done to add a security feature to our robot, essentially so that only group members could run the code. The process worked in the following steps:
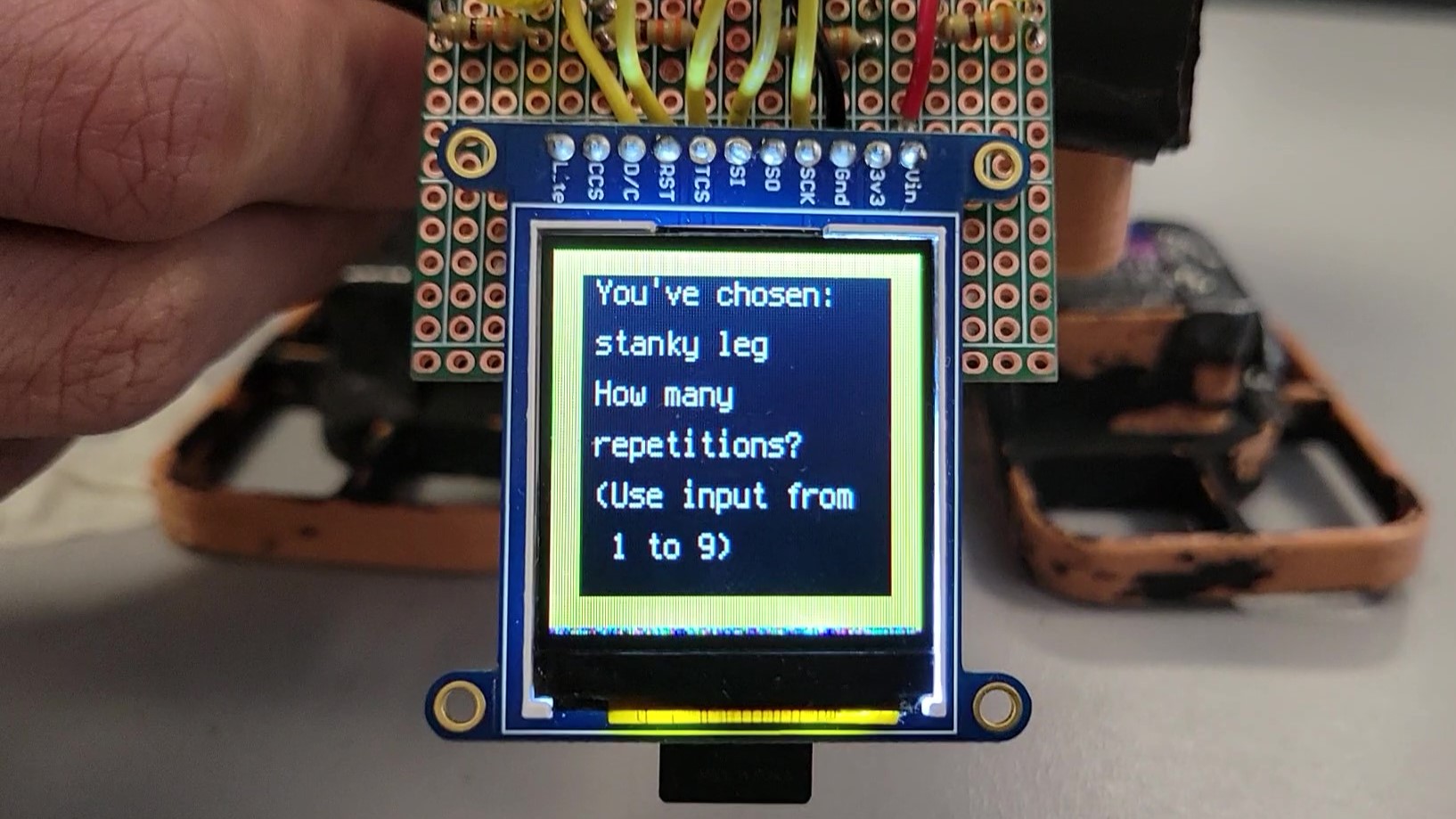
The primary function of this project was to build a dancing robot, thus individual dances had to be programmed, each with their own callable function. When prompted, a user can choose one of these dance moves by clicking a number on the keypad. The user is then prompted for how many times to repeat the move, and if applicable, which side to perform the dance. The program stores this information in a tuple, and using a makeshift switch statement (as Python doesn't use switch statements), call the specific dance function and feed the additional information as arguments. Each dance function rests in a for loop based on the number of repeats, and if applicable has opposite instructions for each side. When a dance is executed, the LEDs display their Chase sequence and the execute tone plays. Here are the dance moves we programmed for Batbot:
This mode presents all available dance moves Batbot can perform. When the user inputs the '*' key, rather than a number, the dance execution function is called with an argument queue of every single dance, repeating 3 times each side (if necessary). Demo mode is the quickest way to exhibit the base requirement of Batbot: to be a dancing robot.
Doing one dance at a time is cool, but what if the user wants Batbot to perform several in a row? This is where choreography mode comes in, accessible by clicking '#' instead of a number on the keypad. Choreography mode allows the user to input several dances, and collects the tuples in a queue. Once the user again clicks '#', the queue of dance moves are executed one at a time. To save storage, individual dance commands input a queue of only one tuple.
This feature was implemented as an easter egg. Part of this dance is displayed in demo mode, but can only be individually accessed via "petting" the robot. An HC-SR04 sonar located at the top of the bot detects the user's hand, and triggers the following sequence:
As everyone in our class was tasked with the same project, we thought the decoration of Batbot could set it apart from other projects at an immediate glance. The top and keypad-less side displays a Batman logo with "man" intentionally crossed out and replaced with "bot", and another Batman logo adorns the front. However, the decorations do not simply serve aesthetic purposes, but also functional ones: